A Future Roadmap for Sensorimotor Skill Learning for Robot Manipulation
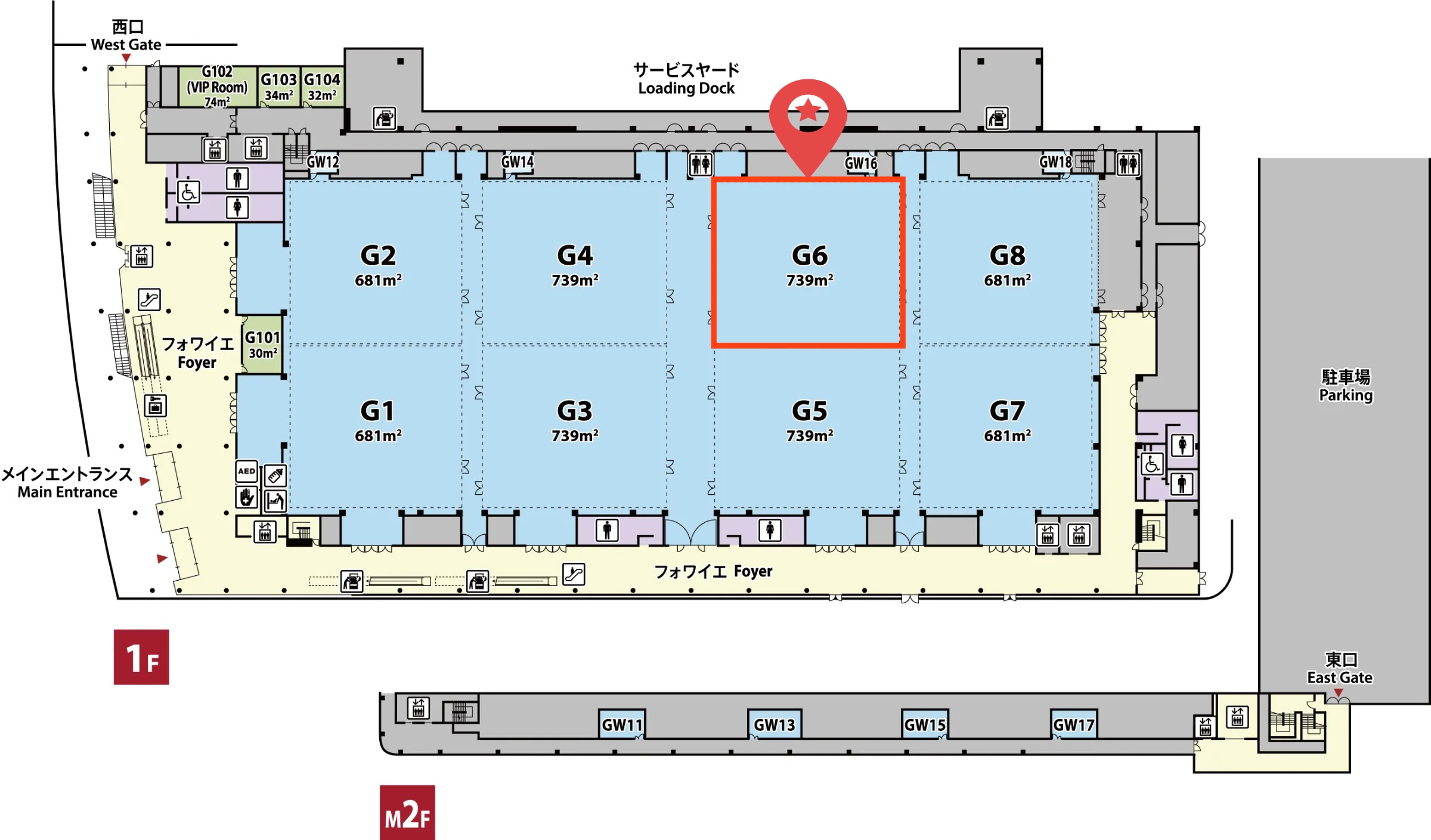
May 13th, Location: G6, North
In recent years, the field of general-purpose robot manipulation has seen exciting progress, showcasing a wide range of success in sensorimotor skill learning. However, unlike research in assembly and logistics manipulations where there are clearly defined, practically/industrially driven tasks to solve, general-purpose robot manipulation research—geared towards everyday situations—lacks community-wise agreement on which robotics tasks are most important to evaluate. To propel this field, our workshop aims to sketch the future roadmap of sensorimotor skill learning for robot manipulation and focuses on the following questions:
- Which manipulation tasks can today's robots solve, and which tasks are still unsolved?
- What are the most important tasks to evaluate in order to advance the field?
- What assumptions should we allow when evaluating these tasks?
We envision that the workshop will help the manipulation community make progress toward understanding which problems we should focus on to build more generalizable and powerful manipulation robots.
Speakers






Schedule
Because of the last-minute notice about logistiscs of the venue, we are very sorry about the 1-hour delay in the morning time schedule.
|
|
Opening Remarks
|
Organizers
|
|
|
Opening Keynote
Navigating the Upward Spiral for Sensorimotor Learning |
|
|
|
Spotlight Talks
|
Authors of contributions
|
|
|
Keynote 1
Advancing Robot Learning: Practical and Societal Impact |
|
|
|
Keynote 2
Towards fast and precise sensorimotor skill learning |
|
|
|
Keynote 3
Towards Deployable Robot Learning Systems |
|
|
|
Lunch Break
|
|
|
|
Keynote 4
Assumptions about our environment and their implication |
|
|
|
Keynote 5
Contact Synthesis Across Diverse Robots, Objects, and Tasks: |
|
|
|
Keynote 6
Mobile Manipulation Skills and Why We Need Them |
|
|
|
Spotlight Talks
|
Authors of contributions
|
|
|
Coffee Break and Posters
|
|
|
|
Panel
Robot manipulation through the lens of skills & tasks : What is a skill? What is a task? |
Shuran Song, Georgia Chalvatzaki, Lin Shao
|
|
|
Closing Remarks
|
Organizers
|
Workshop Location